LeRobot 数据采集
通过操作 LeRobot 机械臂执行指定任务来采集数据,数据会被保存到本地并可以选择上传到 Hugging Face Hub 进行管理和分享。
切换到 LeRobot 虚拟环境
source ~/miniconda3/bin/activate
conda activate lerobot
执行以下命令跟随语音提示完成 3 轮摇操作数据采集,每轮采集在 60 秒内完成抓取香蕉放到苹果旁,然后再在。30 秒内将香蕉摆放回原来的位置后再等待下一轮的语音指令,直到完成 3轮数据采集后命令会自动结束。
dataset.repo_id配置数据集的存储目录名,最终数据会存储到~/.cache/huggingface/lerobot/{repo-id}目录下,注意 repo-id 的格式必须为{xxx}/{xxx}。
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/tty.usbmodem5B415369931 \
--robot.id=zihao_follower_arm \
--teleop.type=so101_leader \
--teleop.port=/dev/tty.usbmodem5B420772871 \
--teleop.id=zihao_leader_arm \
--robot.cameras='{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 5}, side: {type: opencv, index_or_path: 1, width: 640, height: 480, fps: 5} }' \
--display_data=true \
--dataset.repo_id=zhanglei/lerobot-test \
--dataset.num_episodes=3 \
--dataset.single_task="Grab the banana and place it next to the apple." \
--dataset.push_to_hub=false \
--dataset.episode_time_s=60 \
--dataset.reset_time_s=30
录制参数
通过命令行参数设置数据录制流程:
--dataset.episode_time_s=60每个数据录制 Episode(回合) 的持续时间(默认:60 秒)。--dataset.reset_time_s=60每个 Episode 结束后,用于 重置环境 的时间(默认:60 秒)。--dataset.num_episodes=50需要录制的 Episode 总数量(默认:50)。
录制过程中的键盘控制
在数据录制过程中,可以通过键盘快捷键控制录制流程:
- 右箭头(→) : 提前结束当前 Episode 或 Reset 阶段,并进入 下一轮 Episode。
- 左箭头(←) : 取消当前 Episode,并重新录制该 Episode。
- ESC(Escape) : 立即结束整个录制会话。
重放
使用以下命令允许回放任何已采集的片段,或来自任何外部数据集的片段。此功能有助于您测试机器人动作的可重复性,并评估同型号机器人之间的可迁移性。
执行以下命令可让 Follower 机械臂回放之前录制的 Episode 1 的数据,回放过程中会自动加载之前保存的校准结果,并根据录制的数据自动控制 Follower 机械臂的动作。
lerobot-replay \
--robot.type=so101_follower \
--robot.port=/dev/tty.usbmodem5B415369931 \
--robot.id=zihao_follower_arm \
--dataset.repo_id=zhanglei/lerobot-test \
--dataset.episode=1
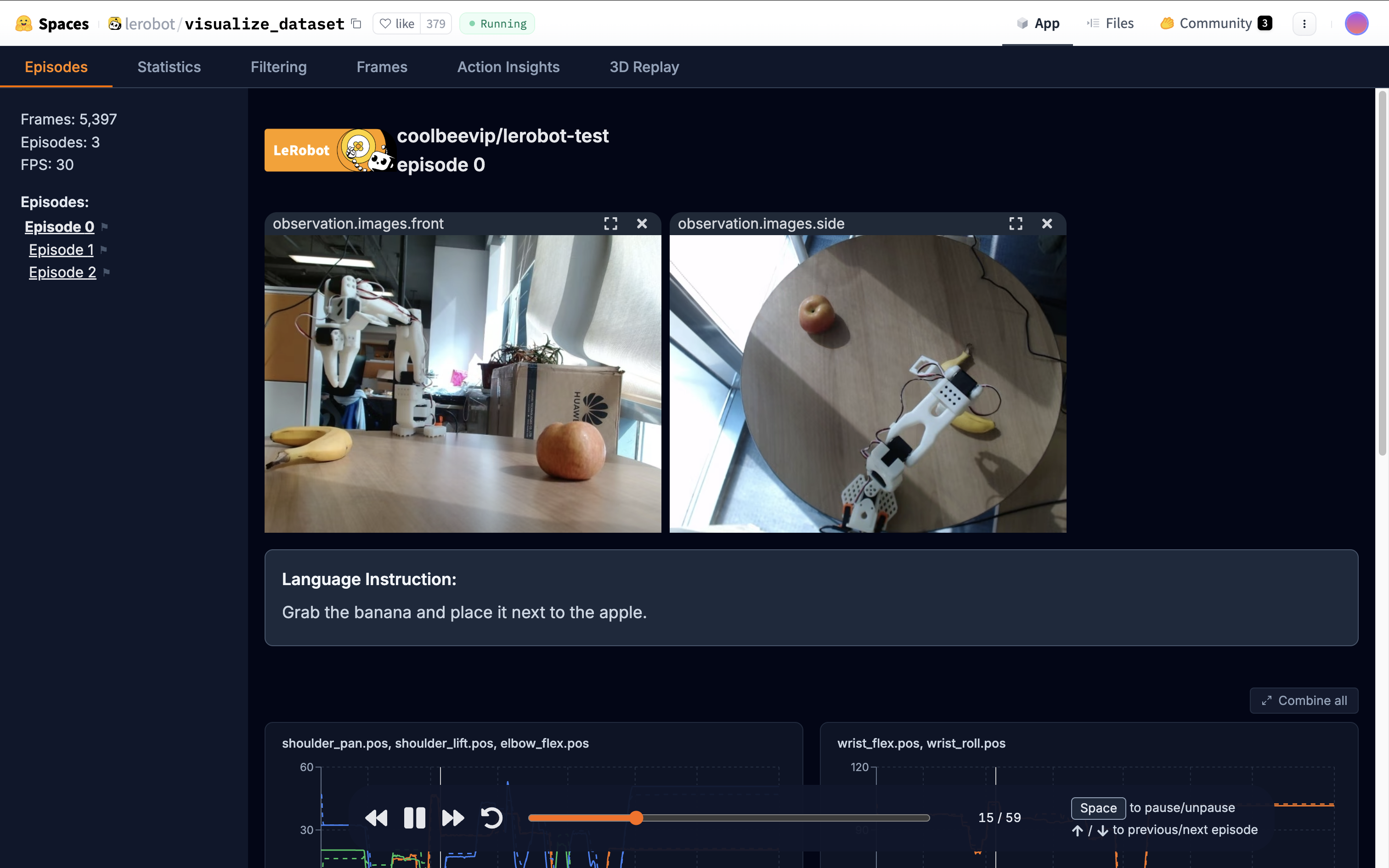
数据集可视化
录制完成后,上传数据到 hub 然后通过 visualize your dataset online 可视化数据
上传数据到 Hugging Face Hub,HF_USER 是你的 Hugging Face 用户名,repo-id 是你之前在录制命令中设置的数据集存储目录名(格式必须为 {xxx}/{xxx})。
hf upload ${HF_USER}/lerobot-test ~/.cache/huggingface/lerobot/zhanglei/lerobot-test --repo-type dataset
这是我上传的测试用训练数据,点开后可以看到如下界面 https://huggingface.co/spaces/lerobot/visualize_dataset?path=%2Fcoolbeevip%2Flerobot-test%2Fepisode_0%3Ft%3D15